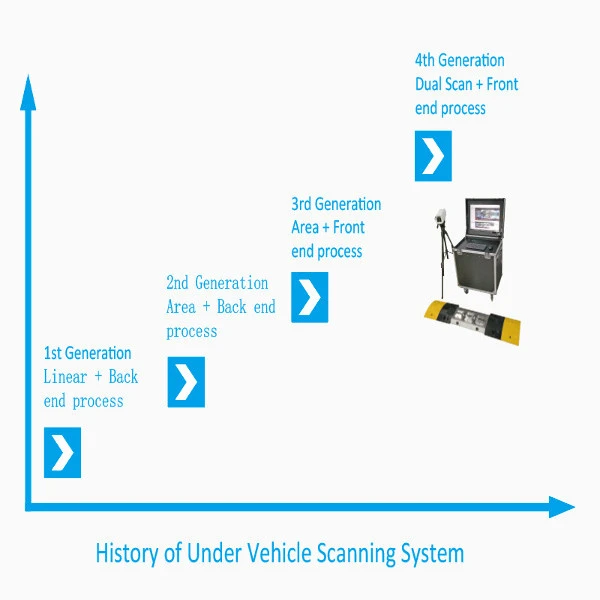
The first generation of under vehicle scanning system uses linear scan technology and user back end machine vision server to process images. Large amount of raw data needs to transmit to back end for processing, and the system efficiency is low. Moreover, distortion caused by un-stable speed while vehicle passing through is not avoidable.
The second generation of under vehicle scanning system uses area scan technology together with back end machine vision server. By this approach, area scan technology guarantee no distortion caused by unstable speed, while still needs to transmit large amount of raw data and needs powerful server to process those data, so it is impossible to achieve high-resolution imaging.
For the third generation, the area scan technology and front-end integration technology are used, only integrated high resolution images are transmitted to the back-end server. However, area scan imaging is easy to be affected by harsh environment and lens contamination.
The fourth generation supports generating area scan image and linear scan image simultaneously and contain benefits from both area scan technology and linear scan technology.