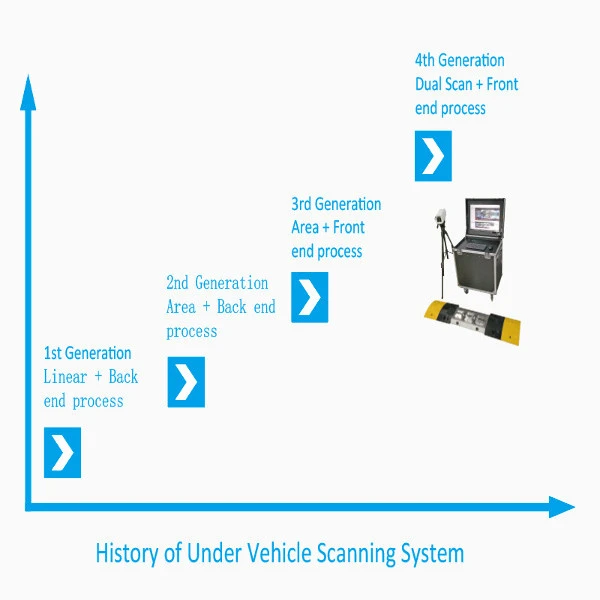
第一代车底扫描系统运用线阵相机加后端拼接的扫描技术,会有大量的重复数据需要传送到后端进行处理,系统效率低。并且线阵相机对于车速稳定性要求高,非匀速行驶车辆成像容易形成拉伸。
第二代车底扫描系统运用面阵相机加后端拼接的扫描技术。面阵相机的运用避免了线阵相机对于车辆匀速行驶的局限性要求,但是仍然没有解决需要传送大量无效原始数据到后端进行处理的问题,从而无法实现高分辨率的成像。
第三代车底扫描系统运用面阵相机加前端一体化技术实现相机端拼接。由于在前端相机内实现数据整合,拼接成完整图片后再传送到后端服务器,从而使系统实现了高清晰度成像。但是生成完整图片后上传服务器的方式也限制了能生成图像的尺寸,无法做火车等超长车辆的扫描,并使得双向扫描受到限制。
UVDM110系列车底扫描系统为第四代车底扫描产品,其采用了双模式扫描加上前端智能一体化技术,能够同时具备面阵扫描技术和线阵扫描技术的优点,并在此基础上实现了实时出图,无限长出图及双向出图,性能明显优于前代产品。